#include <iostream>
#include <vector>
#include <queue>
#include <set>
#include <cassert>
using namespace std;
enum class Action {L, R, U, D};
class State {
vector<vector<int>> v {{1, 2, 3}, {4, 5, 6}, {7, 8, 0}};
int zx = 2, zy = 2;
public:
State() {}
State(const vector<vector<int>>& v0) {
assert(v0.size() == 3);
assert(v0[0].size() == 3);
assert(v0[1].size() == 3);
assert(v0[2].size() == 3);
v = v0;
zx = -1;
zy = -1;
for(int y=0; y<3; ++y)
for(int x=0; x<3; ++x)
if(v[y][x]==0)
{
zx = x;
zy = y;
}
assert(zx>=0); assert(zy>=0);
}
bool operator<(const State& s) const {
return v<s.v;
}
bool operator==(const State& s) const {
return v==s.v;
}
vector<Action> actions() const {
vector<Action> res;
if(zx>0) res.push_back(Action::L);
if(zx<2) res.push_back(Action::R);
if(zy>0) res.push_back(Action::U);
if(zy<2) res.push_back(Action::D);
return res;
}
void apply(const Action& a) {
if(a==Action::L)
{
assert(zx>0);
swap(v[zy][zx], v[zy][zx-1]);
--zx;
}
else if(a==Action::R)
{
assert(zx<2);
swap(v[zy][zx], v[zy][zx+1]);
++zx;
}
else if(a==Action::U)
{
assert(zy>0);
swap(v[zy][zx], v[zy-1][zx]);
--zy;
}
else if(a==Action::D)
{
assert(zy<2);
swap(v[zy][zx], v[zy+1][zx]);
++zy;
}
else
{
assert(0);
}
}
void apply_random() {
vector<Action> a = actions();
apply(a[rand() % a.size()]);
}
void print() const {
cout << v[0][0] << " " << v[0][1] << " " << v[0][2] << endl;
cout << v[1][0] << " " << v[1][1] << " " << v[1][2] << endl;
cout << v[2][0] << " " << v[2][1] << " " << v[2][2] << endl;
cout << "(" << zx << "," << zy << ")" << endl;
}
};
class Problem {
State initial_s;
public:
Problem(const State& is) {
initial_s = is;
}
State initial_state() const {
return initial_s;
}
bool is_goal(const State& s) const {
return s==State();
}
vector<Action> actions(const State& s) const {
return s.actions();
}
State result(const State& s, const Action& a) const {
State res(s);
res.apply(a);
return res;
}
int action_cost(const State& s, const Action& a, const State& sprim) const {
return 1;
}
};
class Node {
public:
State state;
int path_cost;
Node(const State& s, int path_c) {
state = s;
path_cost = path_c;
}
};
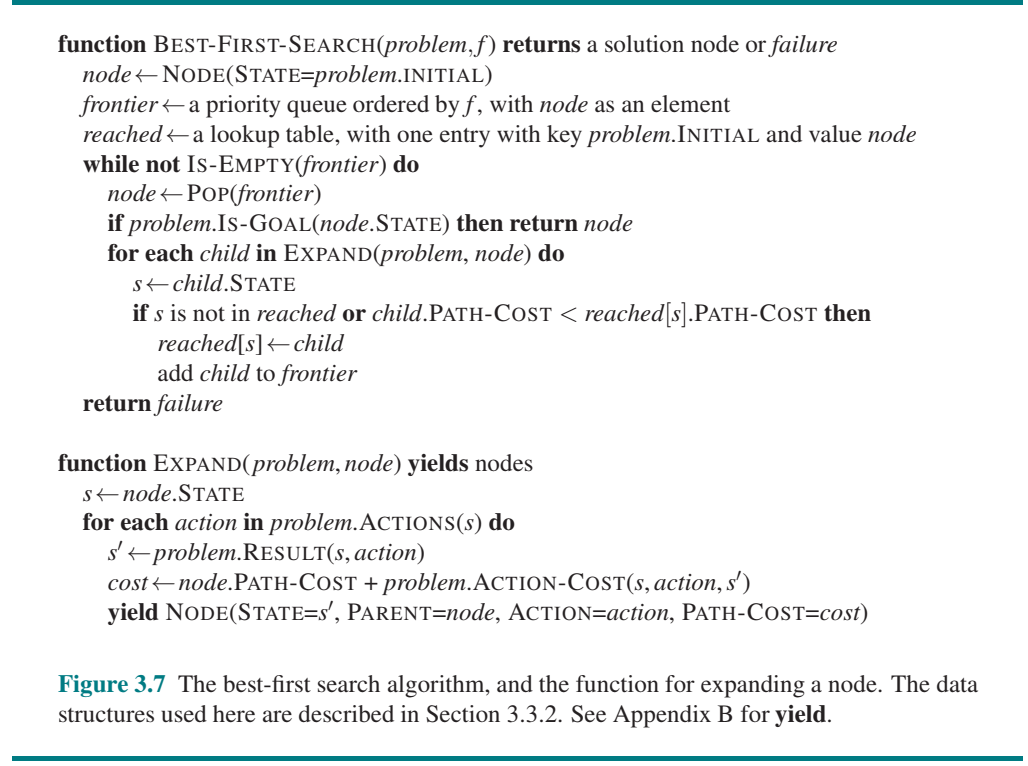
vector<Node> expand(const Problem& problem, const Node& node)
{
vector<Node> res;
// TODO
return res;
}
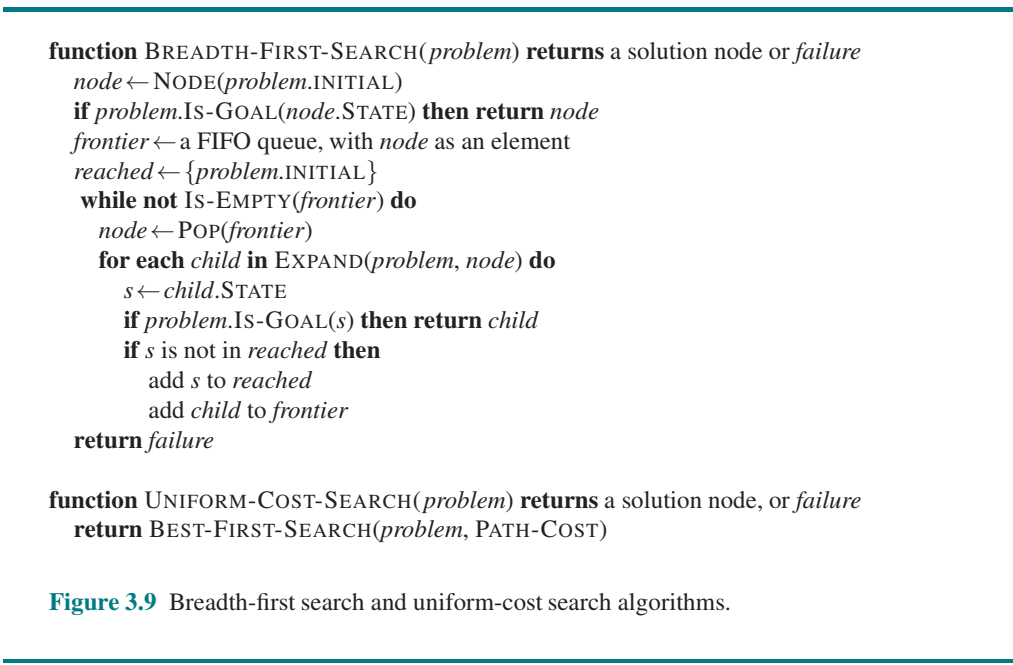
Node BFS(const Problem& problem) {
// TODO
return Node(State(), -1);
}
int main()
{
vector<vector<int>> v(3, vector<int>(3));
cin >> v[0][0] >> v[0][1] >> v[0][2];
cin >> v[1][0] >> v[1][1] >> v[1][2];
cin >> v[2][0] >> v[2][1] >> v[2][2];
State is(v);
Problem problem(is);
Node node = BFS(problem);
cout << node.path_cost << endl;
}Do przetestowania:
State({{1, 2, 3}, {4, 5, 0}, {7, 8, 6}}) -> 1
State({{1, 3, 0}, {4, 2, 5}, {7, 8, 6}}) -> 4
State({{4, 1, 2}, {7, 5, 3}, {8, 0, 6}}) -> 7
State({{8, 7, 6}, {5, 4, 3}, {2, 1, 0}}) -> 30
State({{2, 1, 3}, {4, 5, 6}, {7, 8, 0}}) -> -1